|
| Remote Unload Station |
| Download WindowsMedia File |
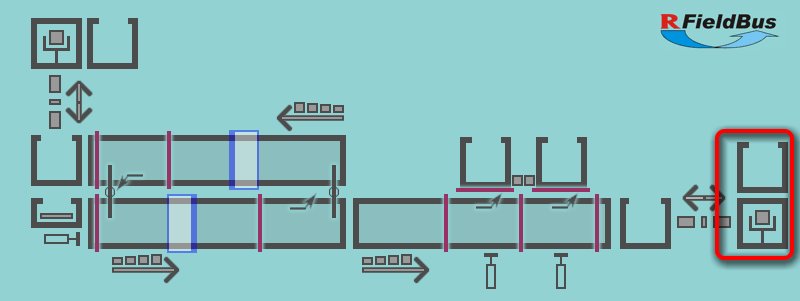
When the (line-guided) AGV arrives in this cell the cell PC (PC4) signals the main PC (PC1) and starts operation of the robotic arm.
The robotic arm transfers the buffer to a user acessible position, and picks up an empty buffer.
The robotic arm transfers the empty buffer to the AGV.
The AGV moves to the cell in the end of the roller belt.
Photos Applications
On the Photos section of this website you may see pictures of:
(Select BACK in your browser to return to this page)
Remote Unload Station
Remote Unload Station Radio Device
Remote Unload Station (Operator View)
On the Applications section of this website you may see details of:
(Select BACK in your browser to return to this page)
The DP Application that interfaces with the Robot Arm
The Voice Application that coonects this station to the main PC